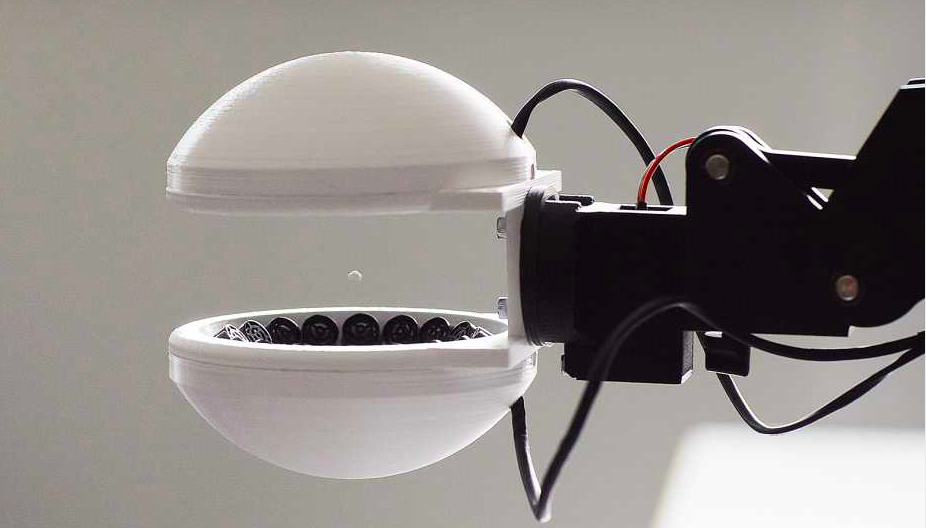
The acoustic gripper can move small objects through space. The software adjusts the gripper to the shape of the object to be lifted, and a robot arm transports the object to the target destination. Credit: ETH Zürich / Stefan Weiss
Gripping without touching: that is the principle behind Schuck’s project “No-Touch Robotics.” The technology is based on an effect that has been exploited for more than 80 years and was first used in space exploration.
Editor’s Note: This article was republished from ETH Zurich.
The post Acoustic gripper lets robots manipulate objects without touching them appeared first on The Robot Report.
Article From: "ETH Zurich" Read full article »
Hire with PACE
The PACE robotics team specializes in placement for robotics, autonomous systems and industrial automation. Contact us today and let PACE find the talent to take your organization to the next level.
Talented Engineers Wanted
PACE aligns elite companies with the best and brightest, and we are always finding new opportunities for technical talent in Boston, Massachusetts, and New England. Submit your resume and let PACE start working for you.